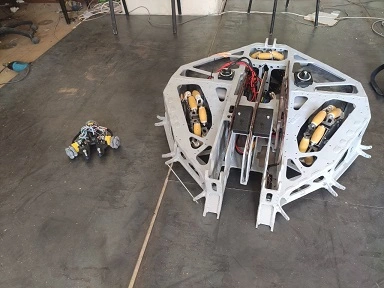
Разработка захвата экзоскелета
Разрабатывая экзоскелет AUXILIUM модель B, для него нужно было разработать и захват. Но процесс разработки затянулся... Одной из главных проблем такого долгого процесса разработки захвата было желание усидеть сразу на всех стульях. Я поставил перед захватом задачи сохранения мелкой моторики и одновременно удержания тяжёлых грузов. При этом как можно меньшим количеством деталей, поскольку чем меньше - тем надёжнее.
В ходе перебора разных типов кострукции был создан интересный захват с уникальной кинематикой, который по итогам был отбракован в пользу более простой клешни. Однако конструкция вышла интересная, поэтому решил поделиться его устройством.
Почему это важно?
Представьте себе: вам нужно что-то поднять или удержать. Вместо того чтобы напрягаться самому, вы просто надеваете экзоскелет, а он уже делает всю работу за вас. Но есть одна проблема — как сделать так, чтобы эта механическая рука не превратила хрупкий предмет в кучу мусора? Именно эту задачу я и попытался решить.
Концепция и задачи
Итак, первым делом нужно было определиться с задачами. Я решил, что захват должен:
Усиливать силу хвата оператора.
Быть эргономичным, чтобы человек чувствовал себя комфортно.
Иметь возможность удерживать объекты разной формы и размера.
Сохранять мелкую моторику пальцев, чтобы можно было открывать двери, нажимать на кнопки и тому подобное
Кинематическая схема
Следующим шагом был синтез кинематической схемы. Если коротко, то это условный чертеж, который показывает, как все части механизма двигаются. В данном случае я использую только набор шарниров вращения (A, B, C, D, E, F, G, H) и поступательное перемещение пневмоцилиндра (привод Р). Все это вместе позволяет перемещаться по траектории, наиболее приближенной к траектории сгиба пальцев человеческой руки. При этом, с минимальным количеством деталей!
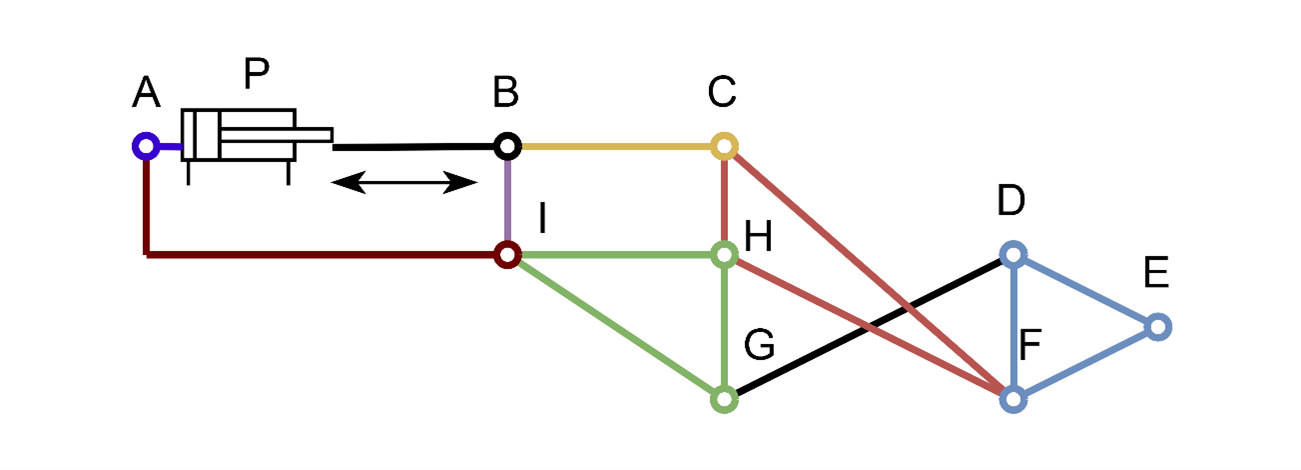
Задаемся размерами
Размеры звеньев были рассчитаны на основе средних антропометрических данных человека:
Длина предплечья: 260-280 мм.
Ширина ладони: 80-100 мм.
Длина пальцев: 100-120 мм.
Эти параметры помогли определить геометрию звеньев и расстояние между шарнирами. Использование антропометрических данных гарантирует биомеханическую совместимость устройства с руками оператора.
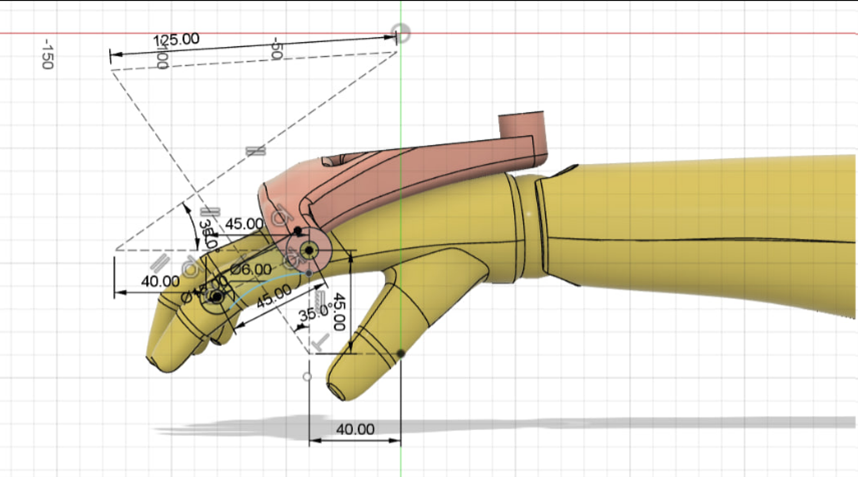
Отталкиваясь от габаритов пневматического привода и его хода, определяются размеры звеньев рычагов механизма CH, BC, AI.
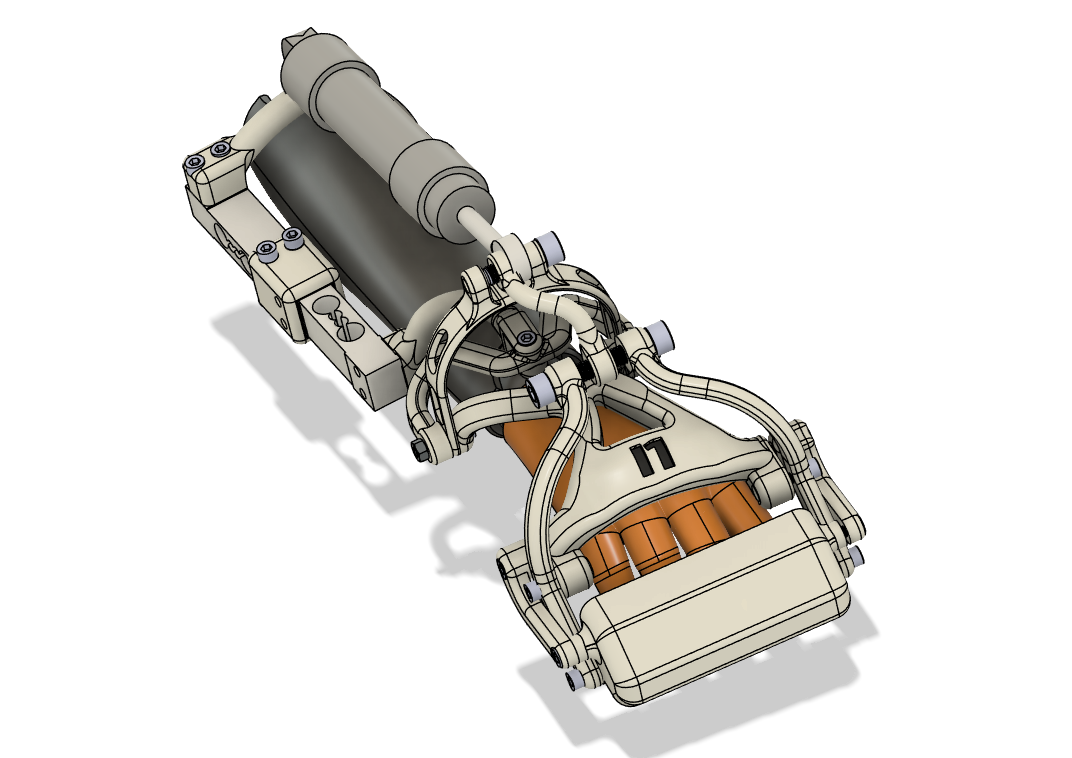
3д моделирование
Здесь начинается самое интересное. Взяв за основу кинематическую схему и расчетные размеры, я создал 3D-модель захвата в программе Fusion 360. Эта модель включала:
Полный набор компонентов (звенья, шарниры, крепления).
Крепежные элементы.
Нейлон PA6 как основной конструкционный материал.
Детали получились сложной формы, поэтому на этапе проектирования я отталкивался от того, что они будут напечатаны из нейлона на 3д принтере (поэтому такая толщина). Но если у вас нет 3д принтера, способного печатать инженерными филаментами, то в целом подойдет и популярный ABS или PLA, но прочность будет ниже.
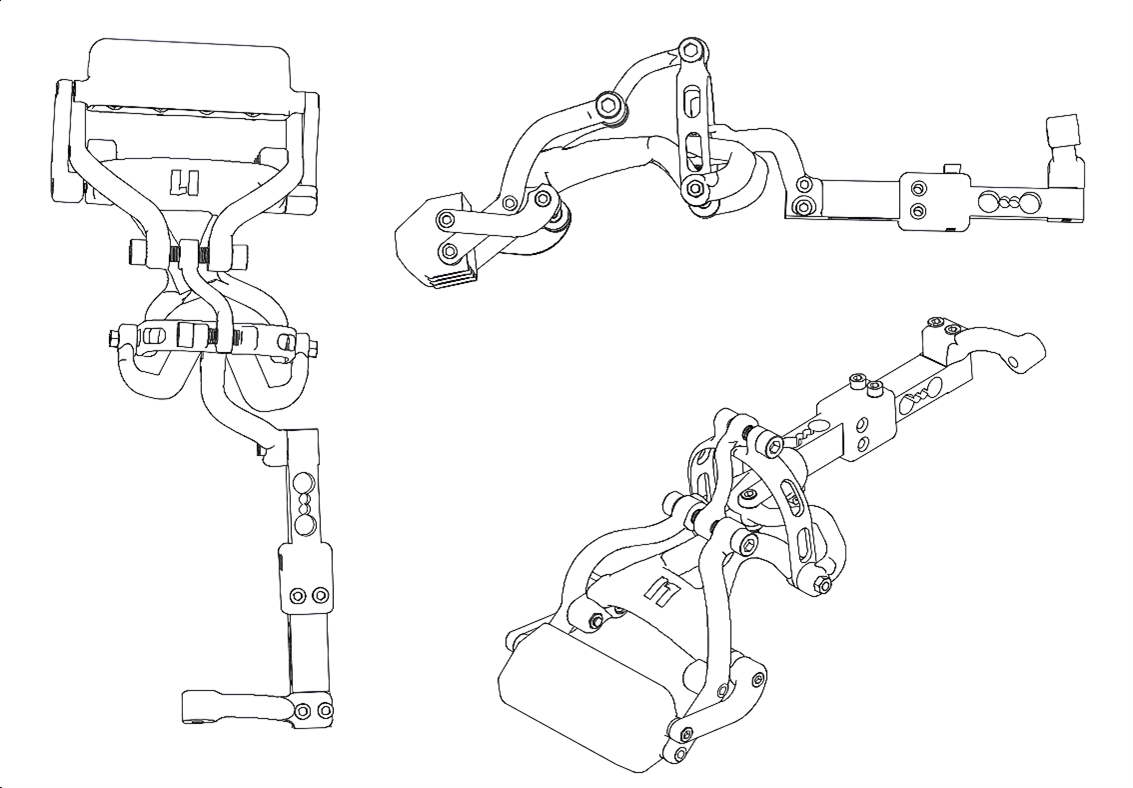
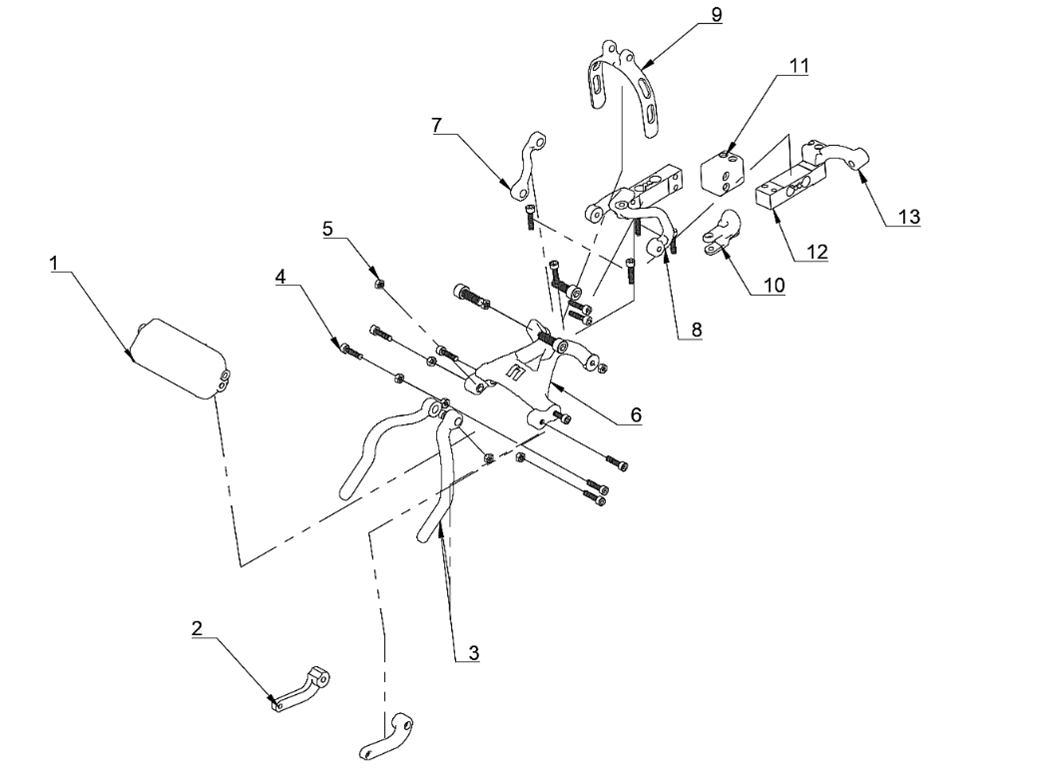
Схема сборки
Схема сборки устройства включает следующие детали:
-
1. Ложе для пальцев.
-
2. Тяги 2 пина.
-
3. Тяги 3 пина.
-
4. Болт М6
-
5. Гайка М6.
-
6 .Основа ладони.
-
7. Тяга для привода на 2 пина.
-
8. Двухосевая основа запястья.
-
9. Радиусная направляющая привода.
-
10. Шарнирная основа каркаса предплечья.
-
11. Соединение тензодатчиков.
-
12. Тензодатчик.
-
13 Точка крепления к локтевому каркасу экзоскелета
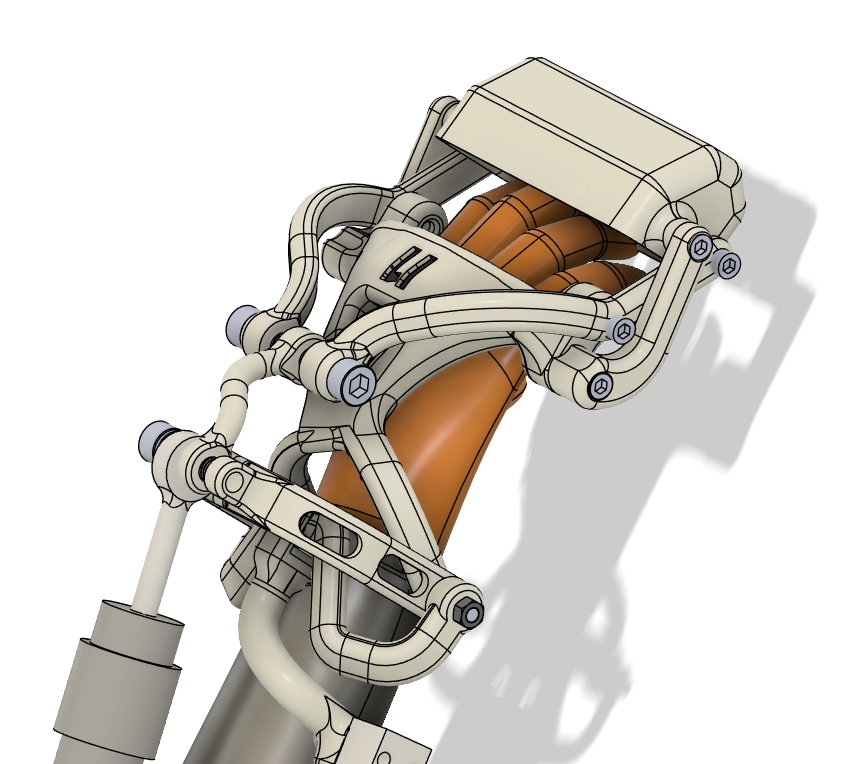
Подвижность
«Тангаж» в запястном суставе согласован с движением пневмоцилиндра. Это решается установкой шарнирного наконечника, что дает отклонения в пределах 10-15 градусов.
Итоги
Разработанный захват для экзоскелета обладает высокой эргономичностью и функциональностью, ну а скачать 3д модель можно здесь